自动控制原理笔记
自动控制原理笔记
参考教材:《自动控制原理(第六版)》胡寿松 同时补充一些学校教材和一些定理证明中额外需要的数学知识
0. 数学知识
0.1 矩阵运算
- 矩阵四则运算
0.2 复变函数
- Liouville定理:整个复平面解析的有界函数\(f(z)\)必为常数。
- 推论:代数基本定理,任意n次方程在复平面上必有n个根。
0.3 信号分析与处理
0.3.1 卷积的定义
- 几何意义 当\(g\)反转后滑过\(f\),两者重叠部分的面积随滑动位置\(t\)的变化
- 连续时间卷积定义 \begin{equation} (f * g)(t) = \int_{-\infty}^{+\infty} f(\tau)\, g(t - \tau)\, d\tau \end{equation}
- 离散时间卷积定义 \begin{equation} (x * h)[n] = \sum_{k=-\infty}^{+\infty} x[k]\, h[n - k] \end{equation}
第一章 自动控制一般概念
- 自动控制:在没有人直接参与的情况下,利用外加的设备或装置(控制装置或控制器),使机器、设备或生产过程(统称被控对象)的某个工作状态或参数(被控量)自动地按照预定的规律运行。
- 反馈控制原理:在反馈控制系统中,控制装置对被控对象施加的控制作用,是取自被控量的反馈信 息,用来不断修正被控量与输人量之间的偏差,从而实现对被控对象进行控制的任务。(按照偏差控制)
- 自动控制系统基本控制方式
- 开环
- 给定量控制(输出直接由输入决定,控制精度取决于元件和校准精度)
- 扰动量控制(利用可测量的扰动进行控制)
- 反馈
- 复合 一点个人看法:要想实现控制,只要知道被控对象可以被何种方式改变被控状态即可。反馈控制好在只需要知道其中一种,代价是响应速度和误差;开环控制则要求控制系统本身的精度和对被控对象的精确建模,其优点则是快速和无差
- 开环
- 自动控制系统的分类
- 线性
- 连续
- 离散
- 非线性
- 线性
- 对自动控制系统的基本要求:稳定性、快速性、准确性
第二章 控制系统的数学模型
2-1 控制系统的时域数学模型
没什么好说的,纯列物理分析方程
2-2 控制系统的复数域数学模型
- 传递函数的定义和性质 线性定常系统的传递函数,定义为零初始条件下,系统输出量的拉氏变换与输入量的拉氏变换之比。考虑到现实中系统,传递函数为有理真分式,同时其反变换是脉冲响应\(g(t)\)。
- 传递函数的零点和极点 有以下两种表达式写法: \begin{equation} G(s)=\frac{b_0(s - z_1)(s - z_2)\cdots(s - z_m)}{a_0(s - p_1)(s - p_2)\cdots(s - p_n)}=K^\frac{\prod_{i = 1}^{m}(s - z_i)}{\prod_{j = 1}^{n}(s - p_j)} \end{equation} 其中\(K^*=b_0/a_0\)为根轨迹增益,主要用在根轨迹法中; \begin{equation} G(s)=\frac{b_{m}\left(\tau_{1} s + 1\right)\left(\tau_{2}^{2} s^{2} + 2\zeta_{2}\tau_{2} s + 1\right)\cdots\left(\tau_{i} s + 1\right)}{a_{n}\left(T_{1} s + 1\right)\left(T_{2}^{2} s^{2} + 2\zeta T_{2} s + 1\right)\cdots\left(T_{j} s + 1\right)} \end{equation} 其中\(k\K=b_m/a_n\)为增益,主要用在频率法中,此增益为稳态增益。(设阶跃输入,然后应用终值定理)。这里mark一下为什么可以分解成二次和一次乘积,因为取一个根的共轭复数,由于取反\((s^n)^*=(s^*)^n\),所以共轭复数也是其根$$*
- 传递函数的极点和零点对输出的影响
- 传递函数的极点可以受输入函数的激发,在输出响应中形成自由运动的模态。传递函数的零点并不形成自由运动的横态,但它们却影响各模态在响应中所占的比重,因而也影响响应曲线的形状。
- 取极端例子分析,如果零极点重合,则该极点被消去,则无此模态,因此可得到一个定性的结论:离原点越近的零点、离该极点越远的极点,贡献的比例越大,反之越小。
2-3 控制系统的结构图与信号流图
- 结构图可以表达非线性(本质上是一个框图表达),信号流图只能用于线性系统,但是有助于计算机表达和计算
- 结构图和信号流图的互相转化:结构图变流图是框图变线路,线路变节点;流图变结构图是节点变线路,线路变节点(理解两个图各个部分的含义)
- 梅森增益公式: \begin{equation} P = \frac{1}{\Delta} \sum_{k=1}^{n} p_k \Delta_k \end{equation} 梅森增益公式的本质上是流图和矩阵行列式计算的等效,因此计算公式不只算输入输出比例,而可以算任意节点的值(等效引出一个阱节点即可),也可以算多输入多输出的线性系统的传递函数,因为是线性系统分别算叠加即可(注意叠加的不是传递函数而是输入输出) 简单写一个定性证明,半定性半定量,便于对梅森增益公式理解
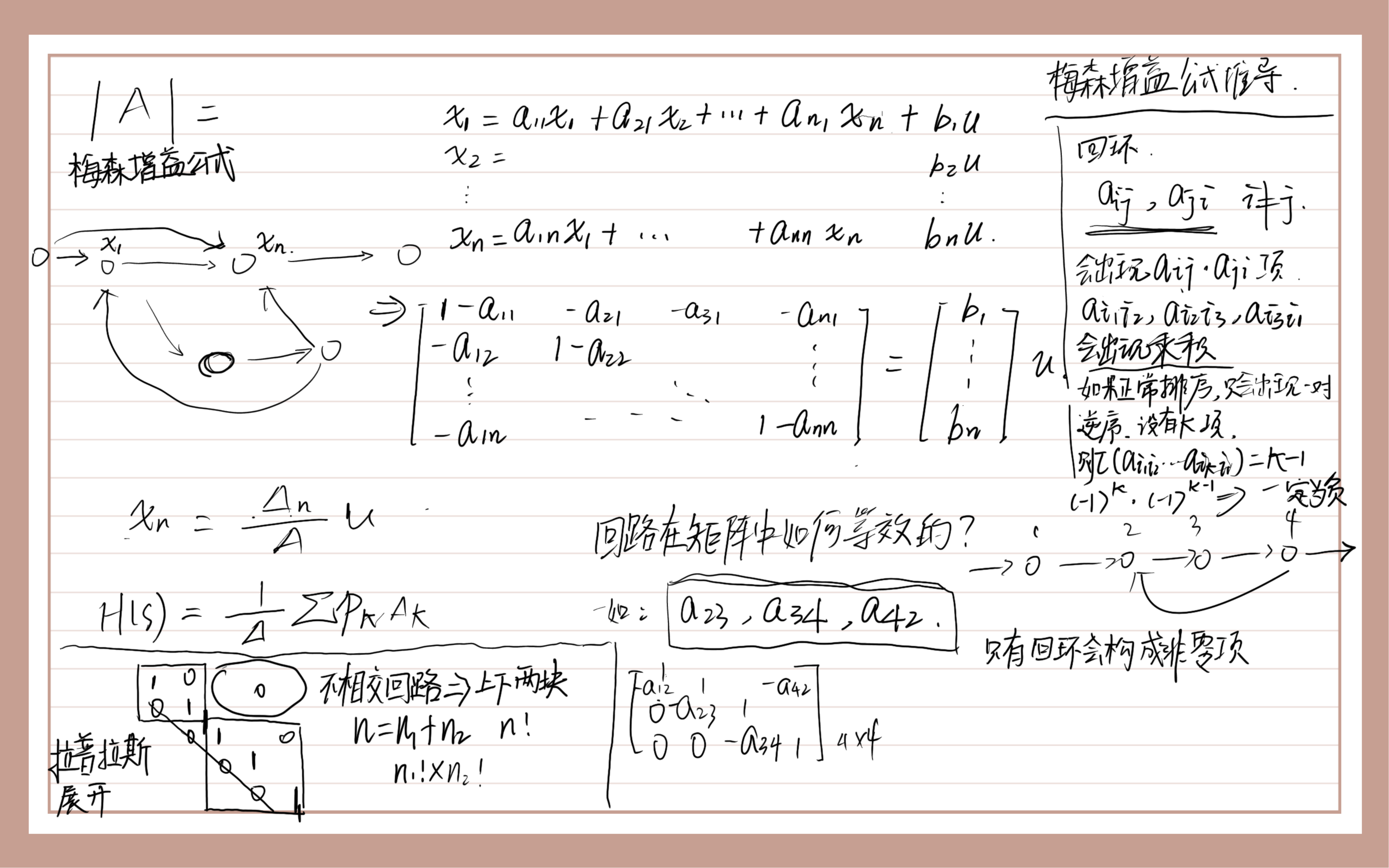 科技写作课时无聊写的一部分证明 如上图所示写的行列式计算时,可以发现,系数矩阵的行列式的每一项正好是一个闭环回路或者多个不相交闭环回路的乘积;\(\Delta_n\)计算时,考察每一项,可以发现每一项正好是前向通道乘上多个不相交闭环回路的乘积和(带符号),梅森增益公式得证。(严格计算证明应该是图论+高等代数,以后有时间补一下相关数学知识)
科技写作课时无聊写的一部分证明 如上图所示写的行列式计算时,可以发现,系数矩阵的行列式的每一项正好是一个闭环回路或者多个不相交闭环回路的乘积;\(\Delta_n\)计算时,考察每一项,可以发现每一项正好是前向通道乘上多个不相交闭环回路的乘积和(带符号),梅森增益公式得证。(严格计算证明应该是图论+高等代数,以后有时间补一下相关数学知识)
第三章 线性系统的时域分析法
3-1 系统时间响应的性能指标
- 考察典型输入信号的性能(阶跃、斜坡、加速度、脉冲、正弦等)
- 动态过程的动态性能:上升时间\(t_r\)、峰值时间\(t_p\),调节时间\(t_s\),超调量\((\sigma\%)\)
3-2 一阶系统的时域分析
3-3 二阶系统的时域分析
3-4 高阶系统的时域分析
主导极点近似为一阶/二阶
3-5 线性系统的稳定性分析
- 稳定性的概念(李雅普诺夫分析方法)
- 大范围稳定
- 小范围稳定
- 线性系统稳定的充分必要条件:闭环特征方程所有根均为有负实部。
- 稳定性判据(其实就是判断方程根是否有正实部)
- 劳斯-赫尔维茨稳定判据
- 劳斯稳定判据
3-6 线性系统的稳态误差计算
- 判断系统型别
- 稳态误差计算(终值定理)
- 减少稳态误差的方法
- 增加系统型别(会影响系统稳定性;计算误差传递函数可以,其型别等于扰动点前型别加反馈型别,扰动点后的前馈型别无抑制效果)
- 增大扰动作用点前的通道的增益(会影响系统稳定性)
- 采用串级控制(内外环结构,典型的是电机控制)
- 复合控制(如增加前馈控制通道)
第四章 线性系统的根轨迹法
4-1 根轨迹法的基本概念
根轨迹简称根迹,它是开环系统某一参数从零变到无穷时,闭环系统特征方程式的根在s平面上变化的轨迹。(因此不止增益,任意参数皆可用此方法分析)
4-2 根轨迹绘制的基本法则
做题需要,规则用复变函数知识推导,除了做题需要记之外,完全是matlab两行代码的事情。
4-3 广义根轨迹
单参数都可以用根轨迹整定。
4-4 系统性能的分析
- 主导极点法 在全部闭环极点中,选留最靠近虚轴而又不十分靠近闭环零点的一个或几个闭环极点作为主导极点,略去不十分接近原点的偶极子,以及比主导极点距虚轴远六倍以上的闭环零、极点。这样一来,在设计中所遇到的绝大多 数有实际意义的高阶系统,就可以简化为只有一两个闭环零点和两三个闭环极点的系统,因而可用比较简便的方法来估算高阶系统的性能。为了使估算得到满意的结果,选留的主导零点数不要超过选留的主导极点数。
4-5 控制系统复域设计
第五章 线性系统的频域分析法
5-1 频率特性
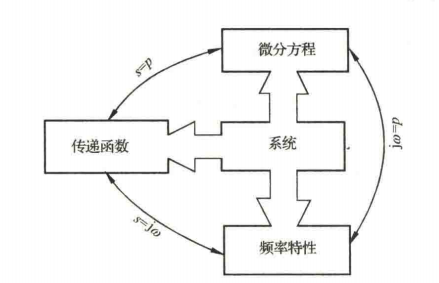 频率特性、传递函数和微分方程三种系统描述之间的关系
频率特性、传递函数和微分方程三种系统描述之间的关系
- 幅相频率特性曲线(Nyquist图)
- 对数频率特性曲线(Bode图)
5-2 典型环节与开环系统的频率特性
matlab直接画。
5-3 频率域稳定判据
奈氏判据:馈控制系统稳定的充分必要条件是半闭合曲线\(\Gamma_{GH}\)不穿过\((-1,j0)\)点且逆时针包围临界点\((-1,j0)\)点的圈数R等于开环传递函数的正实部极点数\(P\)。
- 虚轴上的极点要补充无穷远处的虚线,教材上是把原点和其它虚轴上的点分开讨论的,其实完全可以一起讨论,因为原点只有一个而其它虚轴上的点是成对的,所以其它点是绕\(\mu \times\)180°而原点出是绕着\(\mu \times\)90°。
- 需要注意的是,奈氏判据是根据复数的幅角原理推导的,我在看证明时有疑惑为什么虚轴上的极点是映射到无穷远处,而\(\Gamma_{GH}\)在\(s \rightarrow \infty\)时是直接收敛到0而不是绕着0转半径很小的圈呢?(因为从s映射到\(G(s)H(s)\)时,虚轴上的零极点是绕的小圈,被映射到无穷远处绕大圈,而返回来则是直接在原点,感觉很矛盾)查了以下资料,说是因为在无穷远点解析可以直接收敛到原点,而在虚轴上的极点是不解析的,所以绕着不解析的点小圈才会被映射到无穷远处绕大圈。感觉这个解释比较定性的样子,以后有时间补一下相关的数学
5-4 稳定裕度
- 相角裕度\(\gamma\):对于闭环稳定系统,如果系统开环相频特性再滞后\(\gama\)度,则系统将处于临界稳定状态。
- 幅值裕度\(h\):对于闭环稳定系统,如果系统开环幅频特性再增大\(h\)倍,则系统将处于临界稳定状态。
5-5 闭环系统的频域性能
- 频带宽度:环幅频特性下降到频率为零时的分贝值以下3分贝,即\(0.707 \Phi(j0)(dB)\)时,对应的频率称为带宽频率,记为\(\omega_{b}\),(0,\(\omega_{b}\))为系统的带宽
5-6 控制系统频域设计
第六章 线性系统的校正方法
第七章 线性离散系统的分析与校正
7-1 离散系统的基本概念
在离散系统出来之前,即在计算机控制系统出来之前,连续系统控制器是由模拟电路构成的,测量元件也是把测量的量转化为连续的电压信号,因此其实较早的控制系统都是由硬件电路实现的连续控制系统。但是这样的控制系统的调试和控制效果不够好,因此有以下离散控制策略: 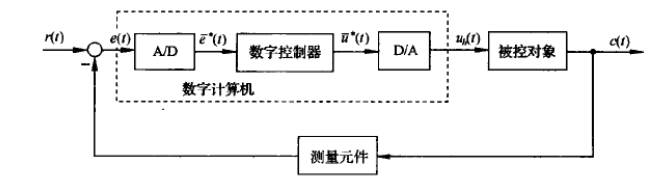 计算机控制系统典型原理图 其中对于计算机本身来说,它的输入是周期为\(T\)的序列,它要计算同时输出周期控制序列,研究的是输入序列和输出序列的关系。
计算机控制系统典型原理图 其中对于计算机本身来说,它的输入是周期为\(T\)的序列,它要计算同时输出周期控制序列,研究的是输入序列和输出序列的关系。
7-2 信号的采样和保持
第八章 非线性控制系统分析
第九章 线性系统的状态空间分析与综合
9-1 线性系统的状态空间描述
- 系统数学描述的两种基本类型:外部描述与内部描述,外部视为黑箱,内部表征系统所有动力学特征
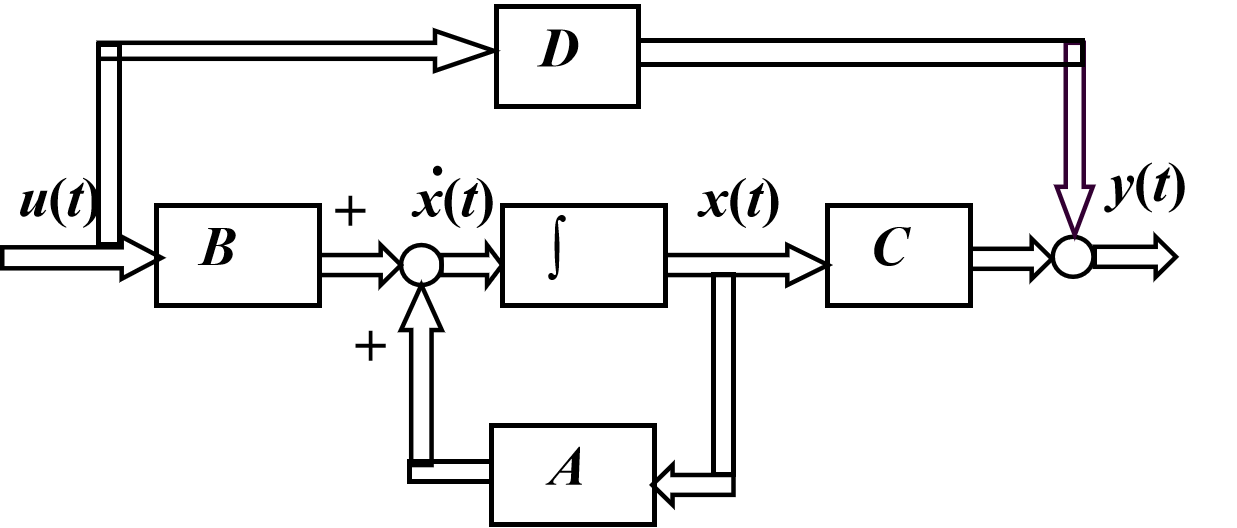 Diagram of state variables
Diagram of state variables
本文由作者按照 CC BY 4.0 进行授权