自适应控制学习笔记
自适应控制学习笔记
1. 绪论
- 被控对象 常规反馈控制研究对象是确定的,动态模型一般已知,而自适应控制对象具有不确定性。(个人认为本质是对于复杂系统没办法构建准确的数学模型,特别还是非线性与时变的情况下)
- 定义 自适应控制由自适应律和可调参数反馈控制器组成,自适应律采用测量的被控对象输入、状态、输出和误差等信息,在线调整反馈控制器的参数(其实这里如果采用增广表示方式,一个可变参数的控制器与一个维度更高的固定参数控制器是完全一样的东西,只不过工程意义上的理解不同),适应被控对象的不确定性,以便在某种意义下使控制性能达到最优或次优,或达到控制器设计的预期目标。
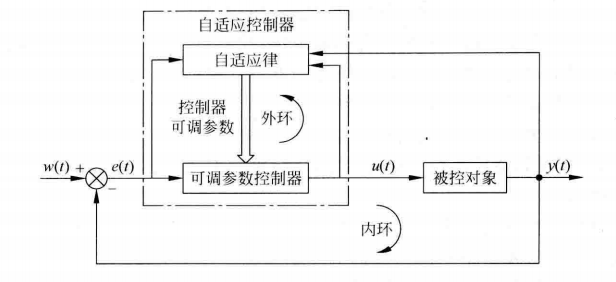 自适应控制器的结构
自适应控制器的结构 - 分类(非本质,只是这种形式划分方便研究学习)
- 自校正控制器 自校正控制器的原理是采用带有未知参数的数学模型来描述被控对象,以模型作为控制器设计模型,采用不同的控制策略设计出参数可调的控制器。
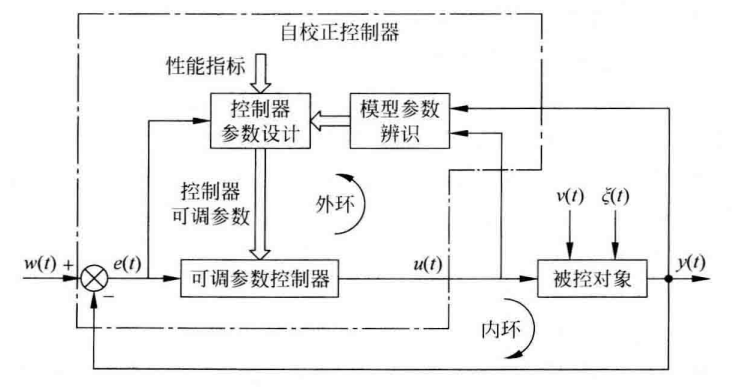 自校正控制器的结构
自校正控制器的结构 - 模型参考自适应控制器 模型参考自适应控制器的原理是将参考模型的输入信号以\(u_w(t)\)加到控制器的同时也加到参考模型的输入端,参考模型的输出代表了期望的控制性能指标,即理想的输出曲线。自适应机构采用广义误差信号(参考模型的输出\(y_m(t)\)或状态\(x_m(t)\)和被控对象的输出\(y_s(t)\)或状态\(x_s(t)\)之差)修改可调参数控制器中的参数,或产生一个辅助信号,使被控对象的输出尽可能跟踪参考模型的输出,使广义误差趋于零。(不是根据真实系统去设计控制器,而是根据控制目标去逼近理想动态。)
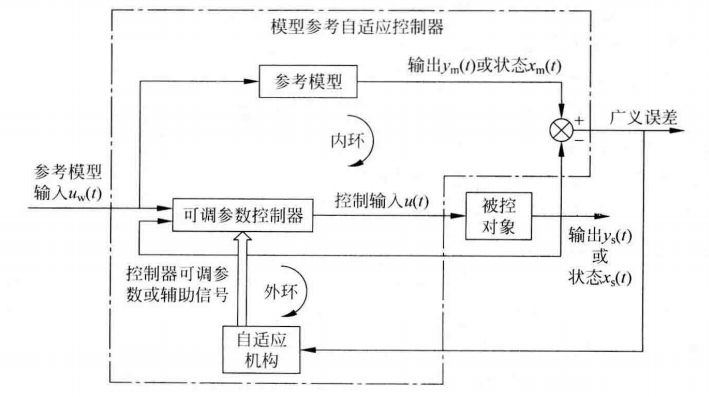 模型参考自适应控制器的结构
模型参考自适应控制器的结构
- 自校正控制器 自校正控制器的原理是采用带有未知参数的数学模型来描述被控对象,以模型作为控制器设计模型,采用不同的控制策略设计出参数可调的控制器。
- 自适应控制的理论问题
- 稳定性和收敛性 Lyapunov直接法和Popov超稳定理论不能完全满足自适应控制的要求,很多问题无法找到全局的函数
- 鲁棒性 具有鲁棒性的自适 应控制系统是指自适应控制系统在存在有界干扰和未建模动态的条件下,仍然具有全局收敛性。如何设计一个具有强鲁棒性的自适应控制器是具有实际价值和重要 理论意义的课题
- 其它理论问题
- 动态性能
- 综合复杂性(难以用数学模型表述的复杂性,一般的是没有准确的数学模型但是可以用数学模型表述其不确定性)
- 其它
2. 模型参考自适应
3. 自校正控制
在自校正控制系统中,被控对象的参数被在线地辨识,然后经过控制器的在线设计过程,对控制器参数进行在线调整(迭代),使其始终能适应被控对象模型的变化。
3.1 系统辨识
本文由作者按照 CC BY 4.0 进行授权